Introduction
Difference between using D-RTK, GCP and just the drone itself in doing survey jobs.
In the beginning, we will need to select a location to conduct the study. The choice we have access to will be MRANTI, which is formally known as Technology Park Malaysia, a 7 Acres land.
The drone that we are using will be DJI Matrice 300 RTK equipped with Zenmuse H20T. By flying 50 meters above ground, we should have a good quality for us to process. The rest of the setting will be overlapping by 80%, side overlapping by 60% and GSD: 1.62 cm/pix.
Mapping makes jobs easier for many industries, it can cover a large area in very little time and does not require as much manpower. But, accuracy is extremely important when it comes to mapping hence the use of real time kinematic, which is known for RTK in some of the DJI Enterprise drones. Aside from using the built in RTK system alone, we are able to pair it with another device or server. In this study, I will find out which drones surveying method is the best, based on the times and accuracy.
Equipments


As we had stated previously, we are using the Matrice 300 RTK pairing with the Zenmuse H20T. M300 RTK is the most common drone in the market due to the compatibility with swappable payload, it is able to carry a high resolution RGB camera and in just a few minutes, it can be swapped with a LiDAR sensor. Zenmuse H20T’s highlight will be the thermal sensor and zoom capability, the wide camera on it isn’t too fancy.
Specification of Zenmuse H20T:
12MP wide Camera
20MP Zoom Camera
Thermal Camera 640x512

Aside from the drone itself, we have the famous DJI D-RTK 2. It is used as a third party GNSS receiver, it works as a reference point for the drone’s GPS in order to get the most accurate position. D-RTK2 will observe a GPS point and provide accuracy up to centimeters. When the drone is flying and performing work, mapping, it will refer to a D-RTK 2 GPS point as a reference to get a coordinate correction.

Next equipment we will be using will be the Spectra SP80 GPS. The main purpose for Spectra Surveying grade GPS is to get an accurate point on the surveying area. The survey grade GPS can get extremely accurate coordinates with centimetres accuracy. The main usage for it will also be to get a reference point, from this point we can use it to determine the accuracy of the orthophoto.
Lastly, we have the RTKnet JUPEM, which is a server that transmits GPS position correction.
Method
The most important thing we need to do will be performing 3 types of mapping which includes:
Drones will be process using Ground Control Point ( GCP )
Drones connected to RTKnet Survey
Drones connected to Drtk2 station on known point
After we have finally collected all the data from doing 3 types of mapping multiple times, we are now able to start processing the data collected by using DJI Terra and compare the coordinate on the photo with the coordinate from Spectra GPS.
Result
The photo above is showing a sample of Orthophoto taken from Area 57 back in MRANTI, Bukit Jalil. For this particular job, there will be 15 GPS Points being taken from different corners of the Orthophoto.
Data collected from the drone will be combined with pdata from Ground Control Point (GCP) before processing.
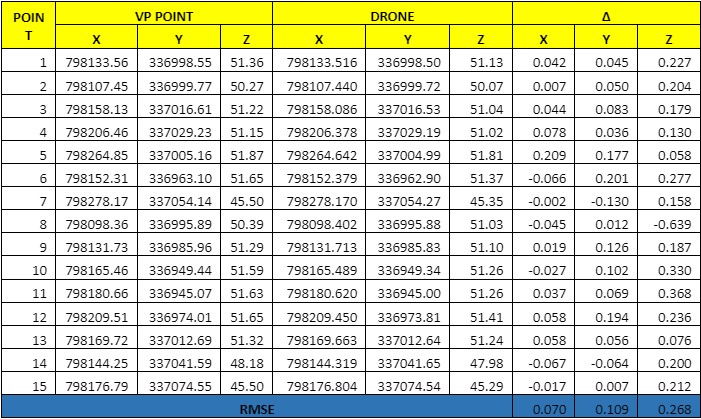
The results are shown on the table above. The comparison between GPS coordinates from Orthophoto with a Survey GPS. These results are collected using only the drone’s RTK system, without referencing any external RTK system. As we can see from the table, the average horizontal error is about 0.07 to 0.109 Meter and the vertical error is about 0.268 Meter.
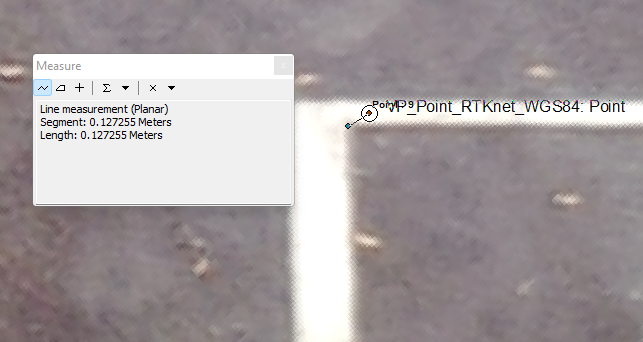
Above image shows the difference between GPS measurement point and Orthophoto point.
Drones connected to RTKnet Surver
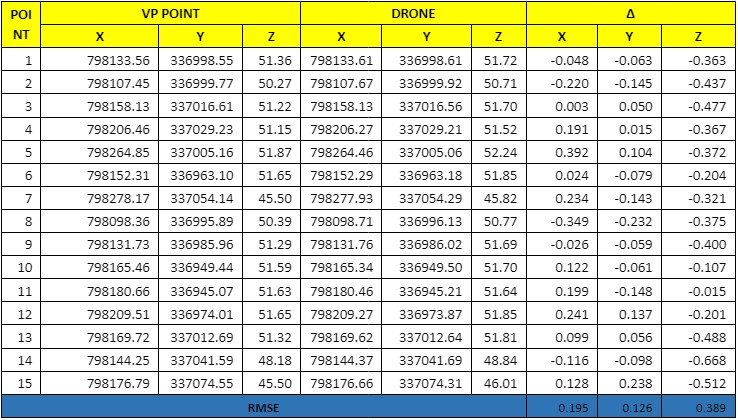
Result above shows comparison between GPS coordinates from Survey GPS with a Orthophoto RTKnet Correction.
For the horizontal error, the average error is about 0.13 to 0.19 Meter,
For the vertical error, the average error is about 0.389 Meter
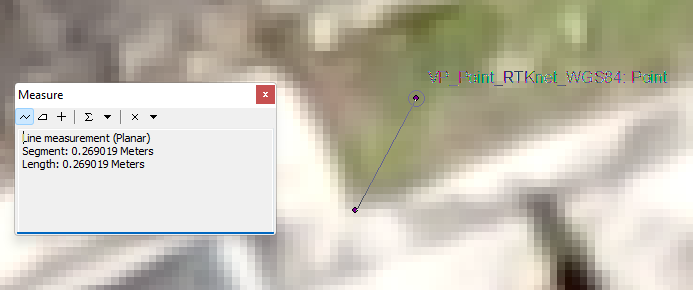
Image above showing the difference separation between GPS measurements point with Orthophoto point
Drones connected to DRTKstation
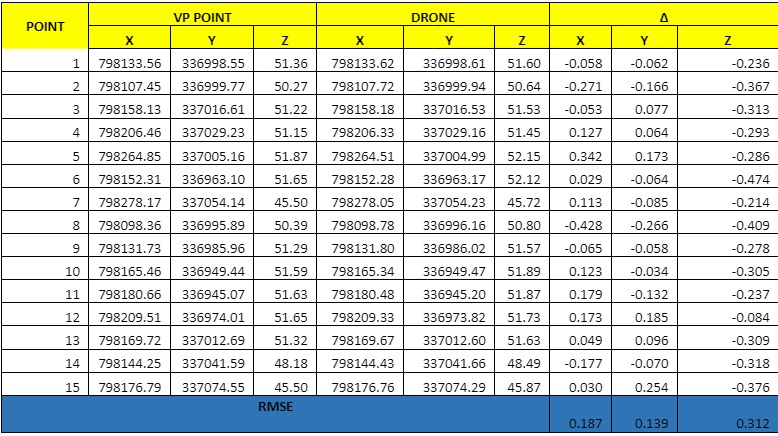
The result above shows a comparison between GPS coordinates from Survey GPS with an Orthophoto taken by the drone with the help of connecting to a D-RTK2.
The average horizontal error is about 0.13 to 0.18 Meter and the average vertical error is about 0.312 Meter.
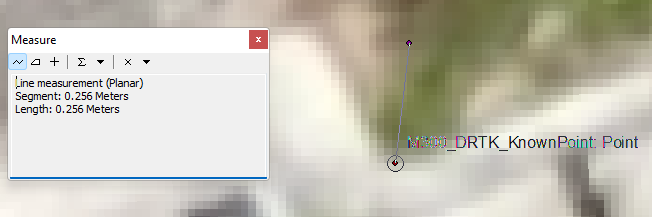
Image above showing the difference separation between GPS measurements point with Orthophoto point
Analysis From All method
First of all, I will discuss the most accurate method of mapping. Through the research, I found that flying the drone with using GCP rather then RTK method and D-RTK2 Method
RTKnet and D-RTK2 methods still can be used but to improve the accuracy of the photo users can add at least 4 GCP points to the processing. This can improve the accuracy of the Orthophoto and also will be used to determine the accuracy of the photo
The good thing about using RTK is that users can fly the drones without needing to set up any GPS point, But the problem is that sometimes RTKnet Server will have a problem and it also depends on the area that users will be flying, internet connection might not be available.
For DRTK method users need to set up a GPS Point for the DRTK station, this point can either be a known point coordinates or unknown point coordinates.
For known point coordinates users can directly process the Orhophoto data.
For unknown Point Coordinates users need to process the Unknown Point to get actual coordinates before users can process the orthophoto.
In a nutshell, every method has its own Pros and Cons, all the methods above are applicable depending on the project site, area condition and also the requirement of the project. If the users want to use the Orthophoto for measurement purposes, such as construction, users can use the DRTK method combined with 4 GCP points.